
Dunia robotika merupakan salah satu teknologi yang sangat cepat perkembangannya, seiring dengan semakin cepatnya perkembangan teknologi informasi dan komunikasi (ICT), sehingga robot dapat di kendalikan tidak dibatasi ruang dan waktu, kapan saja dan dimana saja robot dapat dikendalikan, dengan syarat bahwa media komunikasi sebagai penghub ung antara end user dan robot berjalan dengan baik, salah satunya adalah perkembangan internet of things (IOT). Pada saat ini sudah banyak perusahaan yang menawarkan sistem kendali berbasis cloud computing, yaitu pemanfaan teknoklogi komputer (komputasi) dengan pengembangan berbasis internet (cloud), sehingga membantu untuk perkembangan dari konsep smart city, smart travel, smart healt, smart energy, smart agriculture, dan lainnya.

Sistem kontrol atau sistem kendali merupakan kebutuhan yang harus dipenuhi pada era teknologi saat ini, sehingga kemampuan untuk membangun sebuah sistem kendali yang baik sangat diperlukan. Secanggih apapun teknologi yang digunakan, jika kendali dasar (sistem kendali) yang digunakan tidak baik maka akan sangat mempengaharui kemampuan sistem secara keseluruhan.
Begitu juga denga dunia robotika, secanggih apapun teknologi yang digunakan untuk mengendalikan robot, jika kendali dasar yang digunakan tidak baik maka robot tidak akan dapat bergerak dengan sempurna dan tidak akan bisa melakukan pekerjaan dengan baik. Pengatur untuk pergerakan robot, baik itu robot berkaki maupun beroda adalah pada sistem kendali motor, strategi yang digunakan untuk mengatur kecepatan motor dapat menggunakan mikrokontrol. Mikrokontroler merupakan salah satu media kendali bersifat embedded system, untuk dapat mengatur atau mengendalikan alat tertentu tergantung pada keluaran analog. Salah satu keluaran analog yang digunakan pada mikrokontrol adalah pulse width modulation (PWM).
Pengertian Pulse Width Modulation (PWM)
Pulse Width Modulation (PWM) secara umum merupakan sebuah cara untuk memanipulasi lebar sinyal pulsa dari gelombang elektronik dalam suatu perioda, untuk mendapatkan nilai tegangan rata-rata yang berbeda.
Pada dasarnya PWM biasanya digunakan untuk telekomunikasi (modulasi data), penguat (amplifier), pengatur daya dan juga sebagai regulator tegangan. Pada penelitian ini PWM digunakan untuk mengendalikan kecepatan motor. PWM merupakan sinyal analog yang memiliki amplitude dan frekuensi dasar tetap, yang mengalami perubahan hanya pada lebar pulsa dan memiliki duty cycle bervariasi antara 0% sampai 100% sesuai dengan kecepatan yang diinginkan, semakin besar persentasi maka semakin cepat perputaran motor tersebut. PWM digunakan untuk menghasilkan tegangan keluaran yang bervariasi, mulai dari tegangan 0 volt sampai dengan tegangan maksimal, sifat kenaikan tegangan adalah linier, menaikkan dan menurunkan lebar pulsa, dapat digunakan untuk mengatur aliran arus yang akan mengalir pada motor.
Pulse witdh modulation (PWM) merupakan salah satu teknik yang digunakan untuk mengendalikan kekuatan (power) biasanya mengatur berapa besar tegangan yang akan digunakan dengan mengirim isyarat atau pulsa dalam bentuk sinyal. PWM pada penelitian ini akan digunakan untuk mengendalikan duty cycle pada sinyal yang akan digunakan untuk menggerakan motor sehingga kecepatan motor dapat dikendalikan.
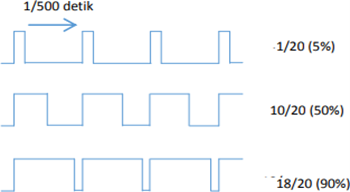
Bentuk sinyal PWM dapat dilihat pada Gambar dihasilkan, pulsa dihasilkan oleh sinyal PWM setiap 1/500 detik, panjang pulsa akan mengendalikan jumlah tegangan yang diterima oleh motor, jika tidak ada pulsa yang masuk maka motor tidak akan berputar sampai pulsa berikutnya sampai.